The technical implementation of the load-adaptive behaviour of the muscles of the human musculoskeletal system offers great potential for minimizing resource and energy requirements in many systems. However, a lack of knowledge about suitable linear actuators is a major reason for the inadequate technical implementation of this biological principle. With a focus on artificial muscles and rope pulls, different linear actuators were analyzed to evaluate their suitability. The study was based on the one hand on the literature and on the other hand on two physical demonstrators in the form of articulated robots, which were manufactured in co-operation with the FAPS of the FAU.
We would like to thank the authors for their cooperation. The article has been published at https://dx.doi.org/10.3390/biomimetics9040236.
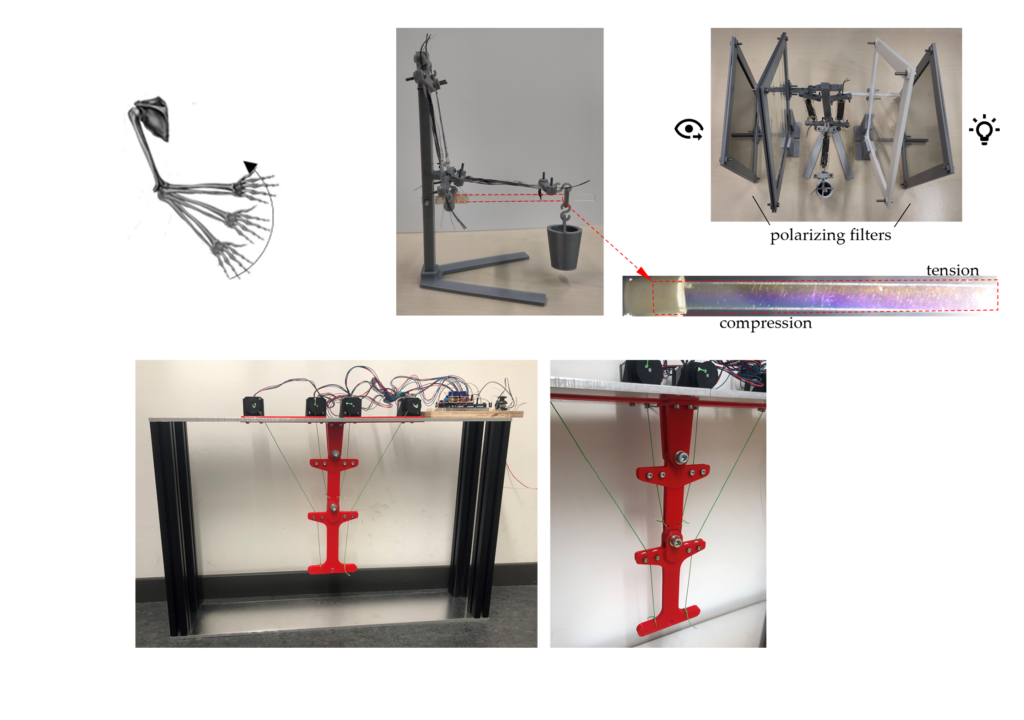
Suitability of linear actuators for load-adaptive, redundant motion generation